Project Description
iCreate3 Robot Description

Top View

Side View
Bayesian Network Description
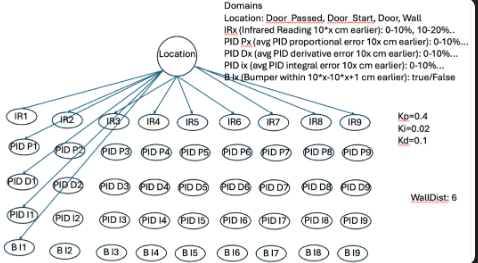
Bayesian Network Structure
Test Pictures
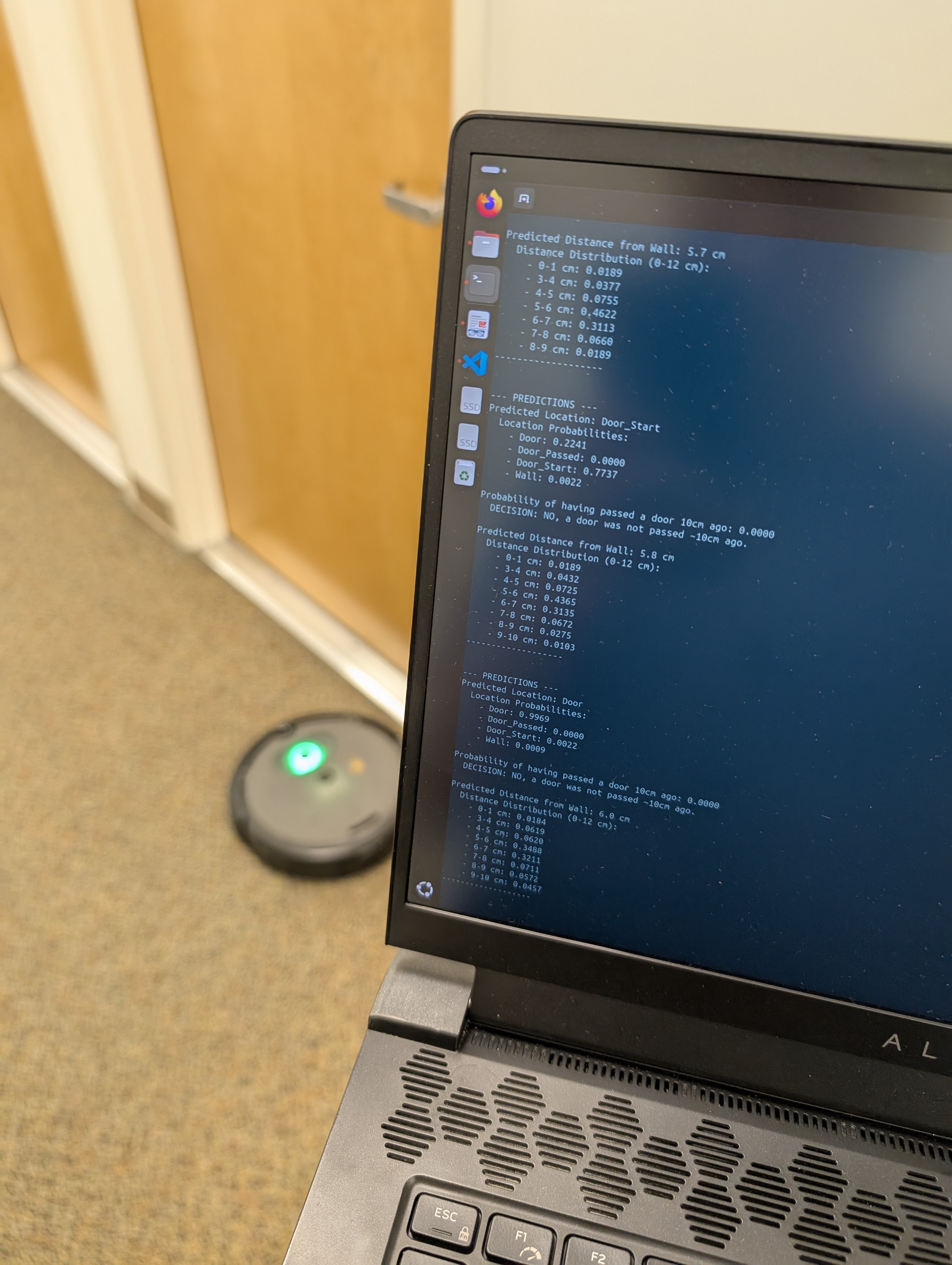
Test Photo 1
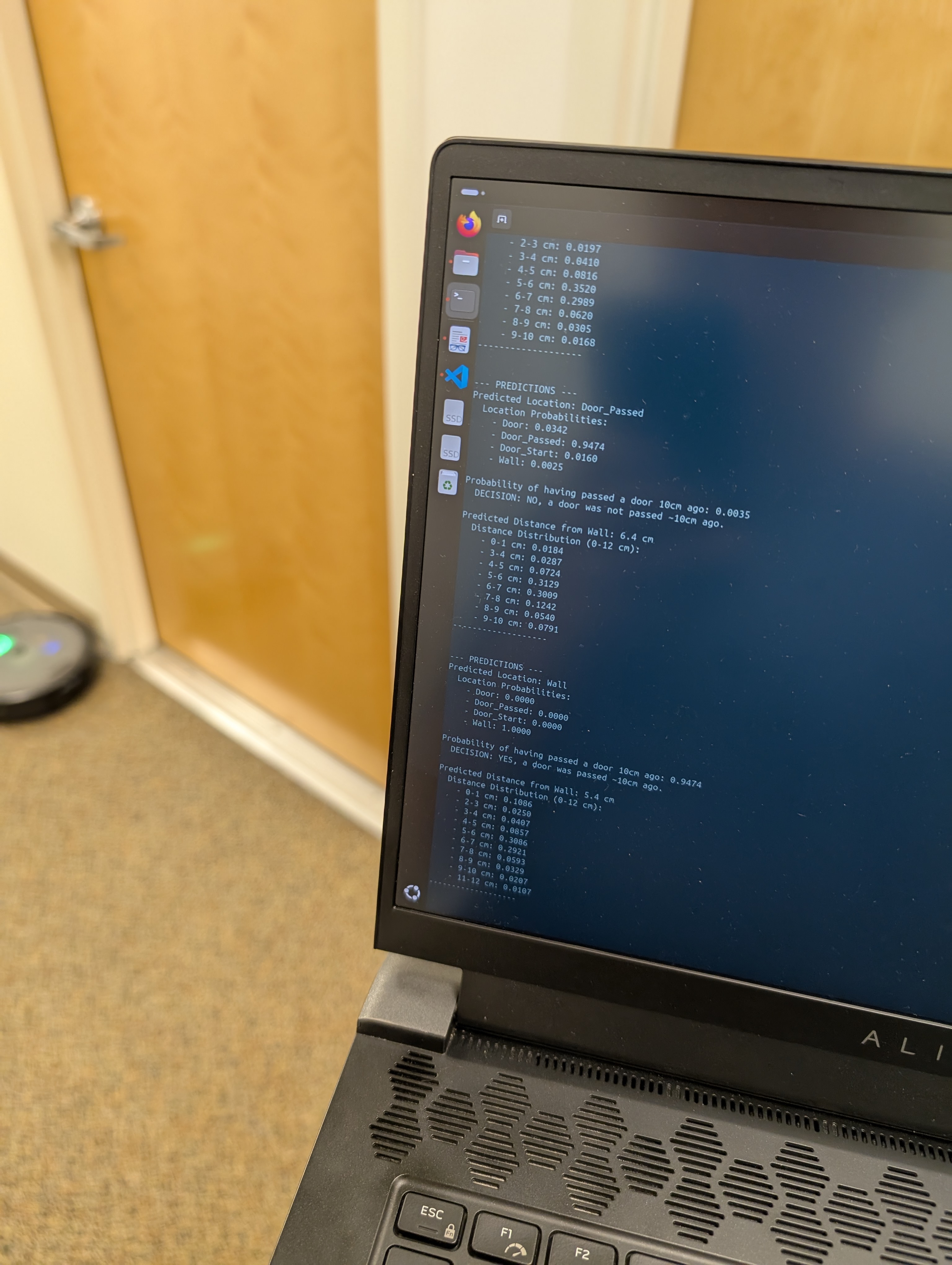
Test Photo 2
Source Code & Dependencies
GitHub Repository
All source code for this project is available on GitHub: